Automatisierte Leergutsortierung mit Vision-Systemen im Mehrwegkreislauf
Die Rückführung von Mehrweggebinden gehört zu den unterschätzten Engpässen der Getränke- und Lebensmittelindustrie. Während Abfüll- und Verpackungslinien in den vergangenen Jahren konsequent automatisiert wurden, blieb der Umgang mit unsortiertem Leergut lange ein manueller Kraftakt.
Paletten mit durcheinander gestapelten Getränkekästen, wie sie aus dem Lebensmitteleinzelhandel zurückkommen, müssen entladen, sortiert und wieder in einen industriell verwertbaren Zustand gebracht werden. Genau an dieser Schnittstelle setzt die automatisierte Leergutsortierung an, die sich zunehmend als Schlüsseltechnologie für effiziente Mehrweglogistik etabliert.


Manuelle Engpässe in einem wachsenden Mehrwegsystem
Mehrweg gewinnt europaweit wieder an Bedeutung. Steigende Rücklaufmengen, heterogene Kastenformate und begrenzte Flächen beim Handel führen jedoch dazu, dass Leergut selten palettenrein zurückkommt. Statt sauber geschichteter Einheiten entstehen instabile Stapel, die bislang vor allem manuell zerlegt wurden. An großen Standorten müssen dabei mehrere tausend Kästen pro Stunde bewegt werden – eine monotone, körperlich belastende Arbeit mit hohem Personalbedarf und entsprechendem Fehlerpotenzial. Automatisierung an dieser Stelle ist technisch anspruchsvoll, da kein definierter Zustand vorliegt. Jeder Stapel unterscheidet sich in Lage, Höhe und Orientierung der Kästen. Klassische Fördertechnik stößt hier an Grenzen, weil sie auf reproduzierbare Geometrien angewiesen ist.

Vision-basierte Sortierung als technologischer Ansatz
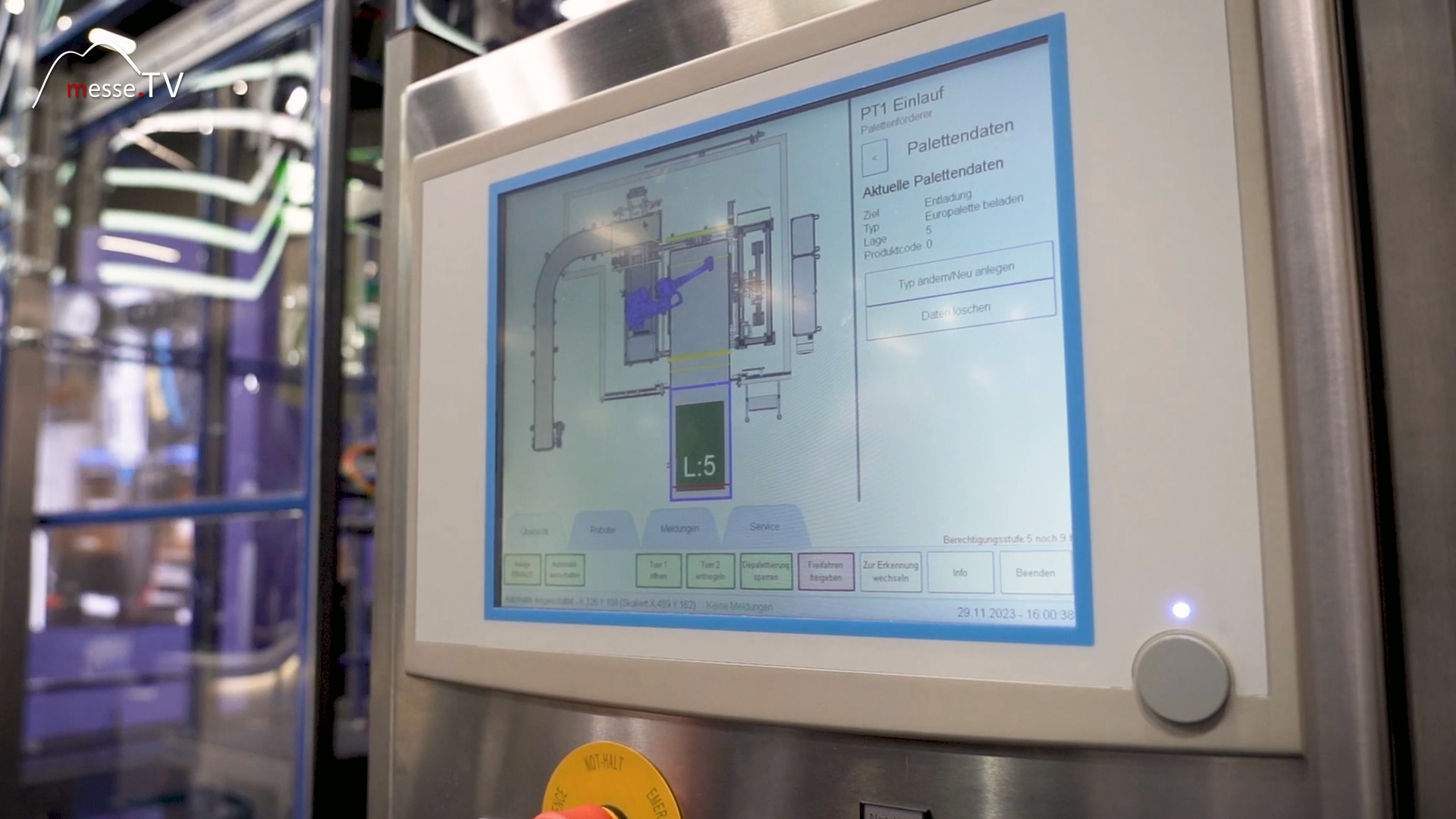
Der Kern moderner Leergutsortierung liegt in der Kombination aus Bildverarbeitung und Robotik. Statt auf starre Mechanik zu setzen, analysiert ein 3D-Kamerasystem kontinuierlich die aktuelle Situation auf der Palette. Erfasst wird nicht nur die Position der Kästen, sondern auch deren relative Höhe und Greifbarkeit. Auf dieser Basis wird jeweils der Kasten identifiziert, der sich am besten entnehmen lässt – häufig jener, der am höchsten oder am freiesten liegt. Nach jedem Greifvorgang erfolgt eine erneute Aufnahme. Das System reagiert damit dynamisch auf jede Veränderung des Stapels. Diese kontinuierliche Neubewertung unterscheidet die Vision-basierte Leergutsortierung grundlegend von klassischen Automatisierungslösungen, die mit festen Sequenzen arbeiten.

Der Zauberwürfel als Antwort auf chaotische Rückläufe
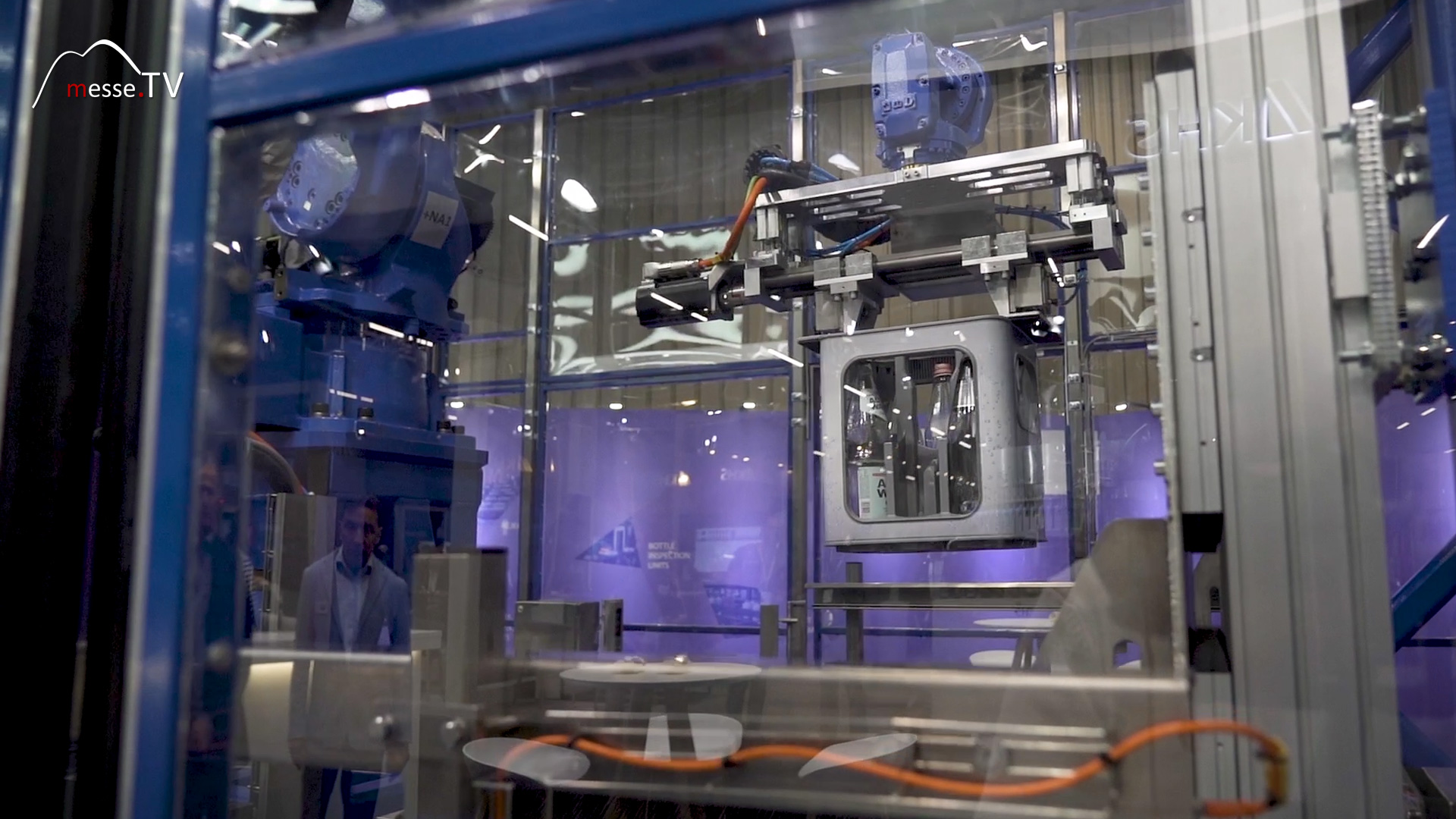
Die bei Vision-Tec entwickelte Anlage mit dem Namen Zauberwürfel ist genau für diese Aufgabe konzipiert. Sie übernimmt das automatische Entladen unsortierter Paletten und führt die Kästen einem geordneten Materialfluss zu. Ein speziell entwickelter Greiferkopf erlaubt es, in unterschiedliche Kastentypen sicher einzugreifen, unabhängig von Hersteller oder Geometrie. Damit ist das System nicht auf ein einzelnes Mehrwegsystem beschränkt, sondern für den realen Mischbetrieb ausgelegt. Die Funktionsweise folgt einem klaren Ablauf:
- Fixierung der Ladung zur Stabilisierung des Stapels
- 3D-Erfassung der aktuellen Kastenlage
- Algorithmische Auswahl des optimal greifbaren Kastens
- Entnahme durch den Roboter mit Spezialgreifer
- Neubewertung der Situation nach jedem Greifvorgang


Technologische Tiefe statt reiner Mechanisierung
Bemerkenswert ist weniger die einzelne Komponente als das Zusammenspiel der Systeme. Kamera, Auswertesoftware, Roboterkinematik und Greifer sind nicht als Zukaufteile nebeneinandergefügt, sondern integraler Bestandteil einer Gesamtlösung. Vision-Tec verfolgt dabei konsequent den Ansatz, alle Kernkompetenzen im eigenen Haus zu bündeln – von der Entwicklung über die Inbetriebnahme bis zum Service. Diese Tiefe ist entscheidend, weil Leergutlogistik ein Nischenmarkt mit hohen Variationen ist. Standardlösungen aus der Palettier- oder Depalettiertechnik lassen sich hier kaum übertragen. Die direkte Kopplung von 3D-Vision und Knickarmroboter für unsortiertes Leergut gilt deshalb als Alleinstellungsmerkmal.
Bedeutung für Mehrweg, Arbeitsschutz und Wirtschaftlichkeit
Automatisierte Leergutsortierung wirkt auf mehreren Ebenen. Sie entlastet Mitarbeitende von schwerer, repetitiver Arbeit und verbessert damit Ergonomie und Arbeitssicherheit. Gleichzeitig erhöht sie die Durchsatzleistung und schafft planbare Prozesse an einem Punkt, der bislang stark von Personaleinsatz abhängig war. Für Betreiber großer Rücknahmestandorte ergibt sich daraus ein strategischer Vorteil. Je stabiler der Leergutfluss, desto besser lassen sich nachgelagerte Prozesse wie Waschen, Sortieren und Abfüllen takten. Gerade im Mehrweg, wo Effizienz und Umlaufgeschwindigkeit entscheidend sind, wird diese Prozessstabilität zunehmend relevant.
Ein spezialisierter Markt mit klarer Perspektive
Vision-Tec ist seit 2011 am Markt aktiv und hat sich bewusst auf dieses eng umrissene Segment konzentriert. Mit rund hundert Mitarbeitern, europaweiter Tätigkeit und einer zusätzlichen Präsenz in Südamerika bedient das Unternehmen einen Markt, der klein wirkt, aber strukturell an Bedeutung gewinnt. Die zunehmende Automatisierung der Getränkeindustrie endet nicht an der Abfülllinie – sie greift immer stärker in vorgelagerte und rückwärtige Prozesse ein. Die automatisierte Leergutsortierung zeigt exemplarisch, wie Digitalisierung und Robotik dort Mehrwert schaffen, wo klassische Technik an ihre Grenzen stößt. Für Vision-Tec ist dieser Fokus kein Randthema, sondern das Ergebnis einer klaren technologischen Entscheidung: komplexe Realität nicht zu vereinfachen, sondern beherrschbar zu machen.




























Messe-Berichterstattung bundesweit - Messewissen, Termine & Veranstaltungen