KIT zeigt ARMAR-7: Wie der humanoide Roboter den Alltag verstehen lernt
von Andreas Bergmeier - 2025-07-19Bewegungen lernen durch menschliche Demonstration
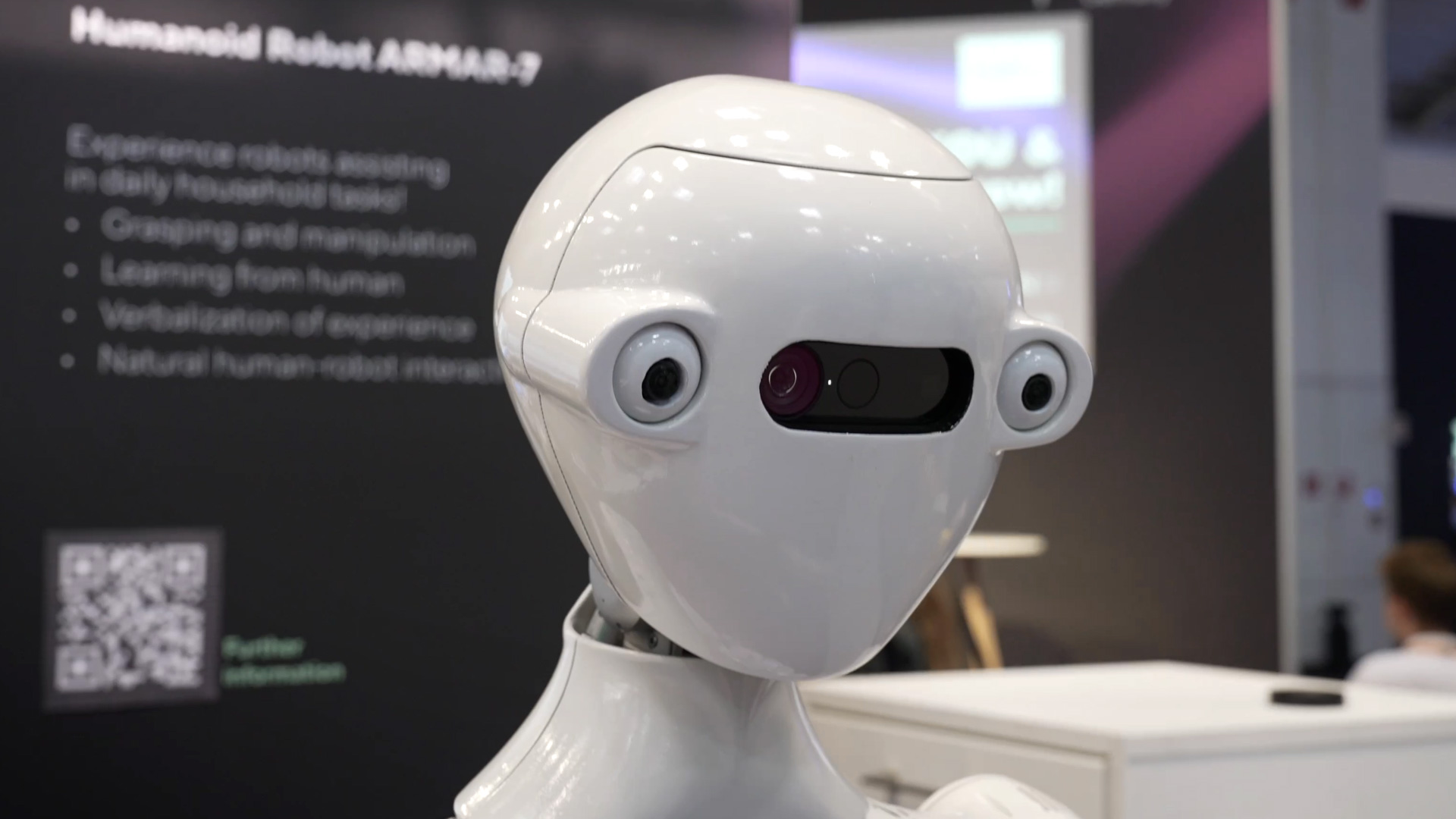
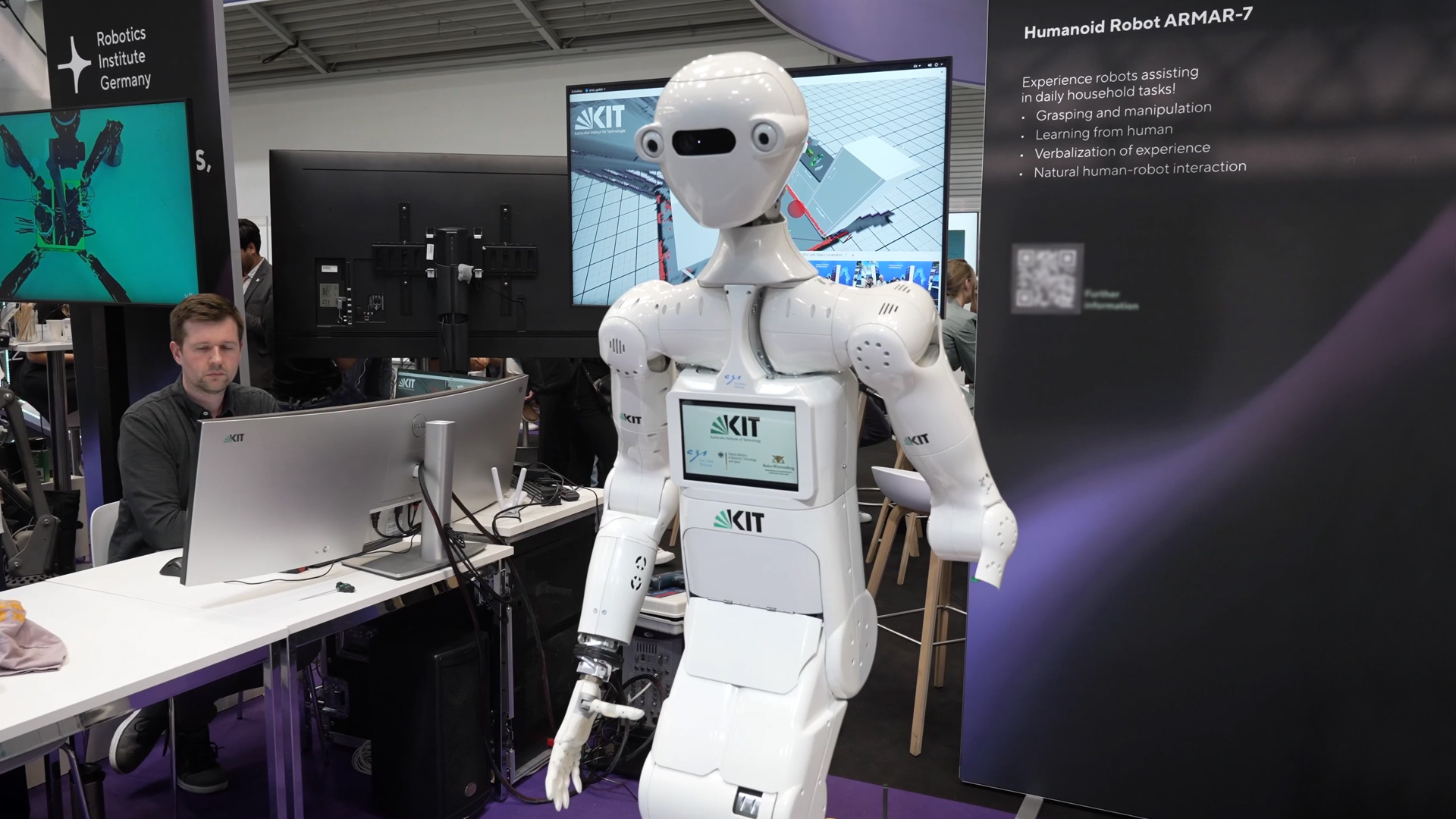
ARMAR-7 ist der jüngste humanoide Roboter aus dem Karlsruher Institut für Technologie (KIT). Es handelt sich bereits um die siebte Generation dieser Serie, die darauf abzielt, Menschen künftig im Alltag zu unterstützen.

Hinter dem Projekt steckt mehr als nur der Versuch, Arme und Greifer zu bauen, die sich bewegen. Die Forscher arbeiten daran, Roboter zu entwickeln, die Bewegungsabläufe durch Beobachtung verstehen und eigenständig auf neue Situationen übertragen können.
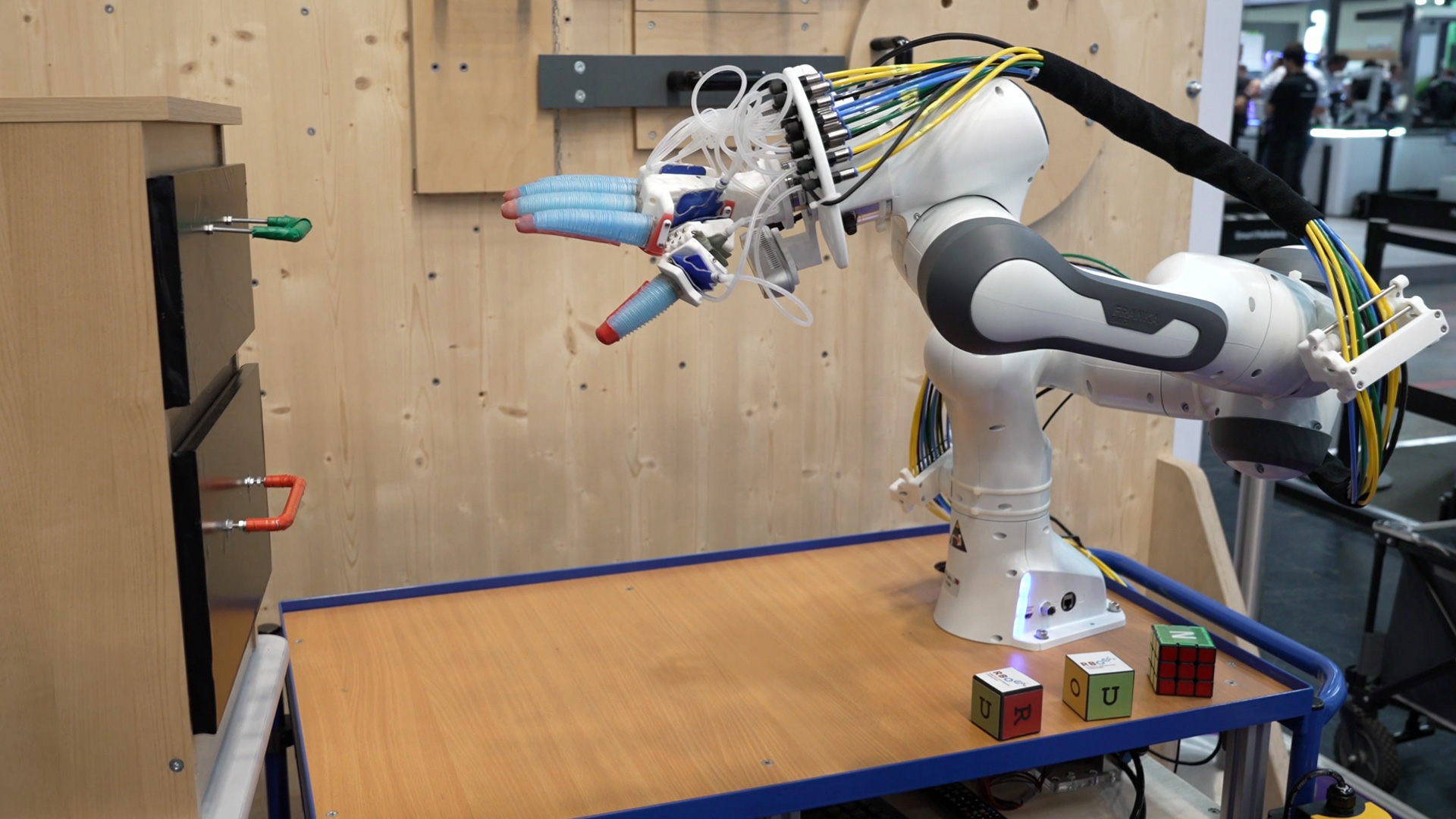
Konkret heißt das: ARMAR-7 beobachtet Demonstrationen von Menschen und „lernt“ daraus. Wird ihm gezeigt, wie man einen Gegenstand vom Tisch nimmt oder öffnet, kann er diese Handlung später selbstständig reproduzieren. Dabei passt er sich sogar neuen Szenarien an.
Der Roboter kombiniert dabei visuelle Informationen, speichert Positionen von Objekten und merkt sich seine eigenen Bewegungsabfolgen. Das Ziel: Er soll Aufgaben nicht nur nachahmen, sondern eigenständig anpassen.
Sprachsteuerung und Objekterkennung im Zusammenspiel
Ein weiterer wichtiger Baustein des Projekts ist die Spracheingabe. Der Roboter versteht verbale Kommandos wie „Schau auf den Tresen“ oder „Bring mir die Milch“. Damit das funktioniert, muss ARMAR-7 Sprachsignale in konkrete Handlungsziele übersetzen und auf bereits gespeicherte Orts- und Objektinformationen zugreifen können. Er erkennt den Sprachbefehl, gleicht ihn mit seinem internen Speicher ab und lokalisiert dann über Kameras und Bildverarbeitung das gewünschte Objekt.

So demonstrieren die Forscher beim KIT, wie ARMAR-7 eine Milchpackung auf einem Tisch identifiziert. Er registriert Form und Position, bewegt seinen Arm präzise dorthin und greift zu. Dass dieser Ablauf klappt, ist das Ergebnis zahlreicher Lernzyklen, in denen der Roboter über menschliche Bewegungen trainiert wurde.
Intuitive Interaktion mit Gesten und Körperhaltung
Doch es bleibt nicht bei Sprache und Sehen. ARMAR-7 soll menschliche Absichten erkennen. Dafür wurde eine interaktive Mensch-Roboter-Schnittstelle entwickelt, die es dem Roboter ermöglicht, Körpersprache zu interpretieren.

Streckt ein Mensch die Hand aus, versucht ARMAR-7, dies als Aufforderung zu verstehen und das Objekt zu übergeben. Interessant dabei: Der Roboter führt keine starren Programme aus, sondern reagiert dynamisch. Verliert er etwa während des Hineinlegens den Kontakt zum Objekt, erkennt er dies und greift erneut zu.
Kleine Unsicherheiten sind dabei gewollt – sie zeigen, ob ARMAR-7 in Echtzeit nachkorrigieren kann. Genau diese Fähigkeit unterscheidet ihn von klassischen Automatisierungen, die stur eine vorher definierte Sequenz abarbeiten würden.

Perspektiven für Pflege und Alltagshilfe
Die Entwickler am KIT sehen zahlreiche Einsatzmöglichkeiten: von alltäglichen Haushaltstätigkeiten bis hin zu Assistenzfunktionen in Pflegeeinrichtungen oder Krankenhäusern. Gerade dort könnte ein humanoider Roboter Aufgaben übernehmen, die körperlich belastend oder schlicht wiederholend sind. Auch bei der Betreuung älterer Menschen wäre ein solcher Helfer denkbar.

Dabei liegt der Fokus nicht nur auf der Hardware, also mechanischen Armen, Sensoren und Motoren. Besonders wichtig ist die sogenannte kognitive Architektur. Sie sorgt dafür, dass ARMAR-7 nicht nur einzelne Bewegungen beherrscht, sondern versteht, in welchem Kontext sie stehen. Objekte erkennen, Positionen merken, Aktionen dokumentieren und bei Fehlern selbstständig neu ansetzen – all das gehört dazu.
Forschungsplattform für die weltweite Robotik-Community
Ein bemerkenswerter Ansatz des Projekts: Die Forscher am KIT machen ihre Arbeit öffentlich zugänglich. Publikationen und Code werden so weit möglich veröffentlicht, damit andere Institute und Entwickler darauf aufbauen können. Das soll die weltweite Forschung beschleunigen und Lösungen fördern, von denen am Ende alle profitieren.
Nicht zuletzt dafür ist auch die Teilnahme an Veranstaltungen wie beim Robotics Institute Germany wichtig. Dort kommen Robotikexperten aus verschiedenen Ländern zusammen, teilen Herausforderungen und diskutieren gemeinsame Ziele. Der Austausch von Wissen wird so zum Multiplikator, um humanoide Roboter wie ARMAR-7 schneller aus den Laboren in reale Umgebungen zu bringen.









Messe-Berichterstattung bundesweit - Messewissen, Termine & Veranstaltungen