Configurable cantilever handling for industrial applications
by J. Groh - 2026-04-30In industrial automation, the focus is increasingly shifting from rigid individual components to flexibly configurable system solutions. Configurable cantilever handling is an example of this development.
It combines mechanical precision with digital planning and shows how complex requirements can be translated into standardised but adaptable solutions. Especially in production environments with varying workpieces, weights and cycle times, the ability to adapt quickly is crucial. A handling system must not only work stably, but also be able to map different movement profiles. This is precisely where the concept shown comes in, which is designed as a modular system and integrates both mechanical and electrical components.

Festo boom handling as a modular, configurable system
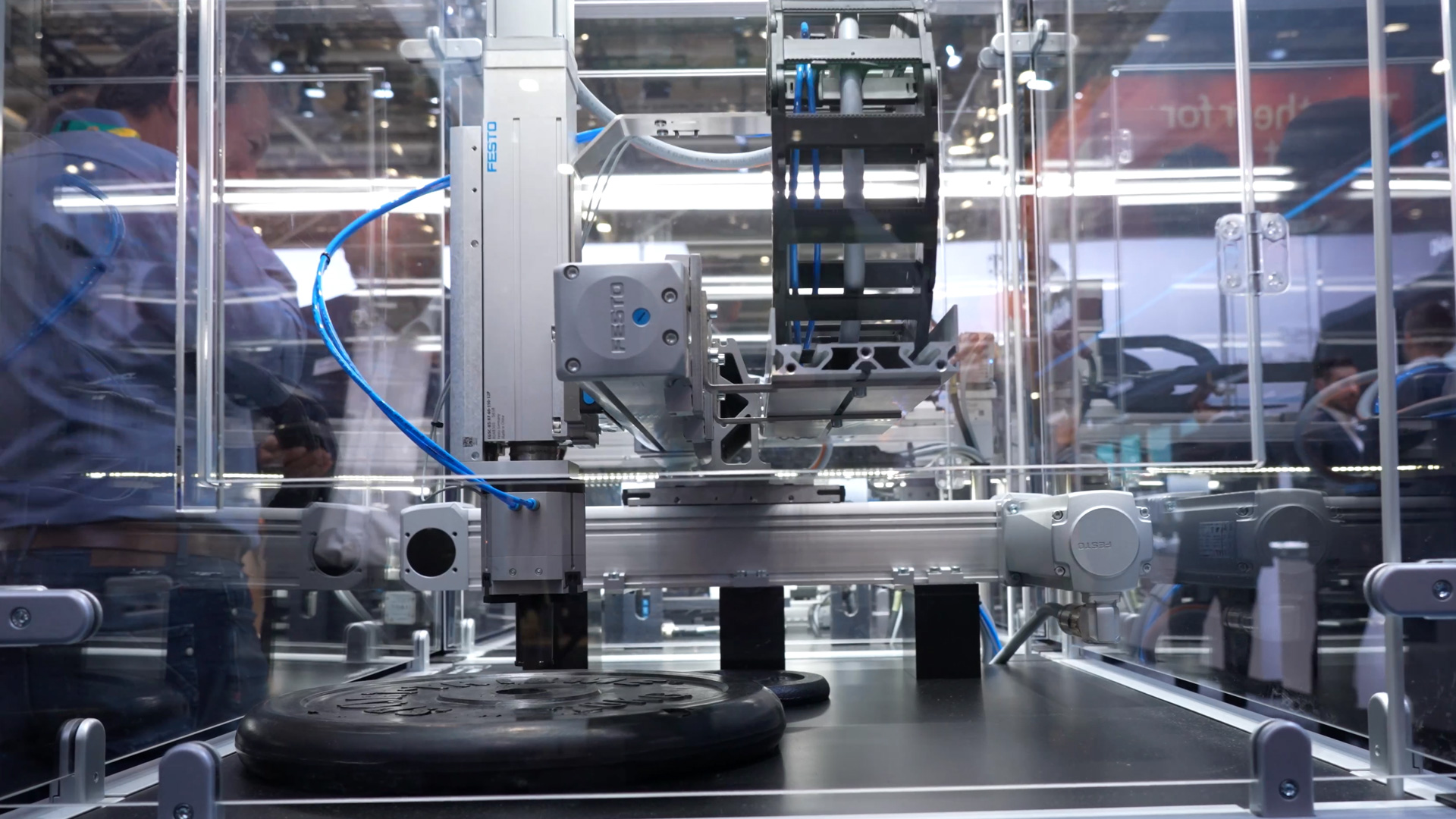
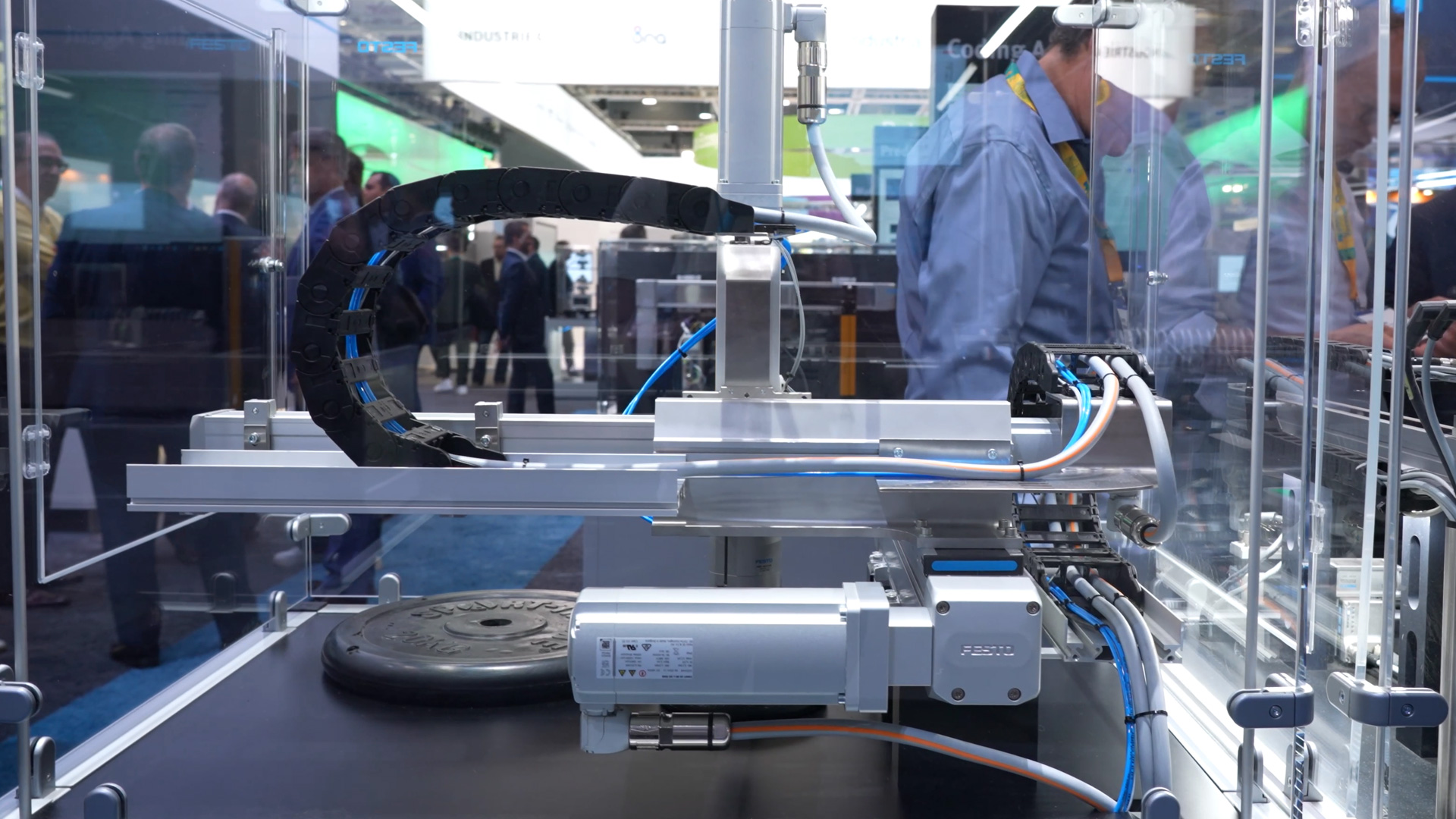
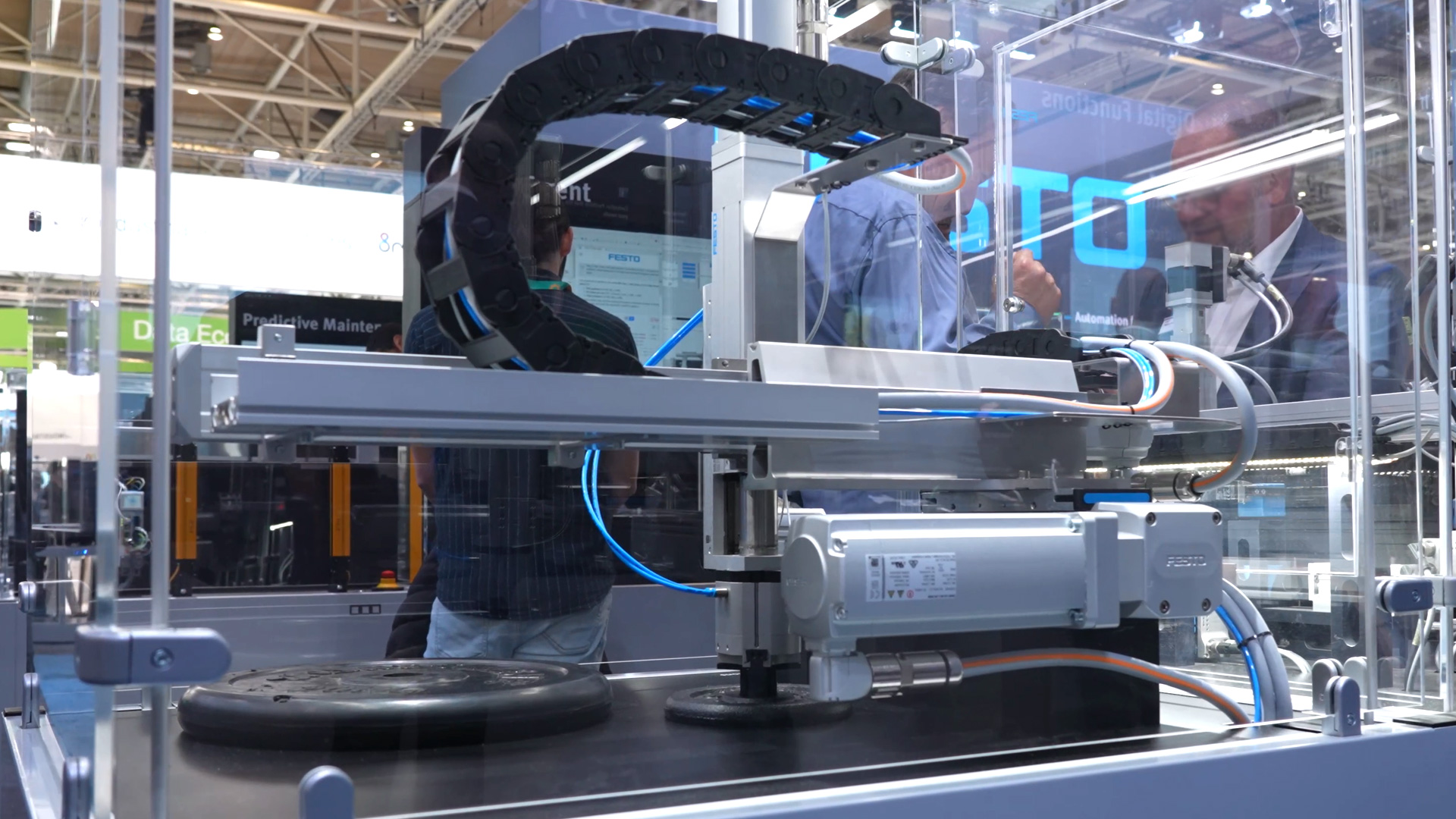
Festo's boom handling system is based on a clearly structured modular principle. It combines electric axes, drives, motors, cable systems, drag chain solutions as well as motor controllers and controls in one integrated unit. The aim is to create a customised solution from standardised components without giving up the advantages of a series product. Festo is thus demonstrating an approach that dissolves traditional product boundaries. Instead of selecting individual components and combining them manually, the system is created from a structured configuration. Users define their requirements - such as size, weight or desired speed - and receive specific solution proposals based on this. The system shown here illustrates this flexibility using a boom structure. It is designed in such a way that both high rigidity and dynamic movements are possible. The combination of a heavy and a light weight plate serves as a demonstration for different load cases within a system.
Configurator as an interface between customer and system
A central element is the digital configuration tool. It takes on the task of deriving a suitable technical solution from the user's requirements. The user simply specifies the framework conditions - such as dimensions, loads and movement profiles. The configurator then calculates several variants that are technically feasible. These are then manufactured and delivered as a finished solution. This eliminates the time-consuming selection of individual components from catalogues for the user. At the same time, the risk of incorrect configurations is reduced. The functionality can be visualised in just a few steps:
- Enter size, weight and desired dynamics
- Automatic generation of suitable system variants
- Provision of 3D CAD models and technical data
- Delivery as a pre-assembled and wired system

Wide range of variants for boom handling and gantry systems
In addition to classic boom handling, the system also includes other types of kinematics. These include portal systems in two- or three-dimensional design as well as variants with or without an additional Z-axis. This variety makes it possible to cover different applications without having to develop a completely new solution each time. The configurability extends to details such as motor selection or stroke dimensioning. Users can decide whether stepper motors or servomotors are to be used and which motor family is most suitable. The axes can also be selected within a defined range. Despite this wide range of options, the system remains a standardised product. Delivery times and costs are based on series solutions, while customisation to the specific application is retained. This balancing act between standardisation and individualisation is a central feature of the concept.

Integration of mechanics, drive and control
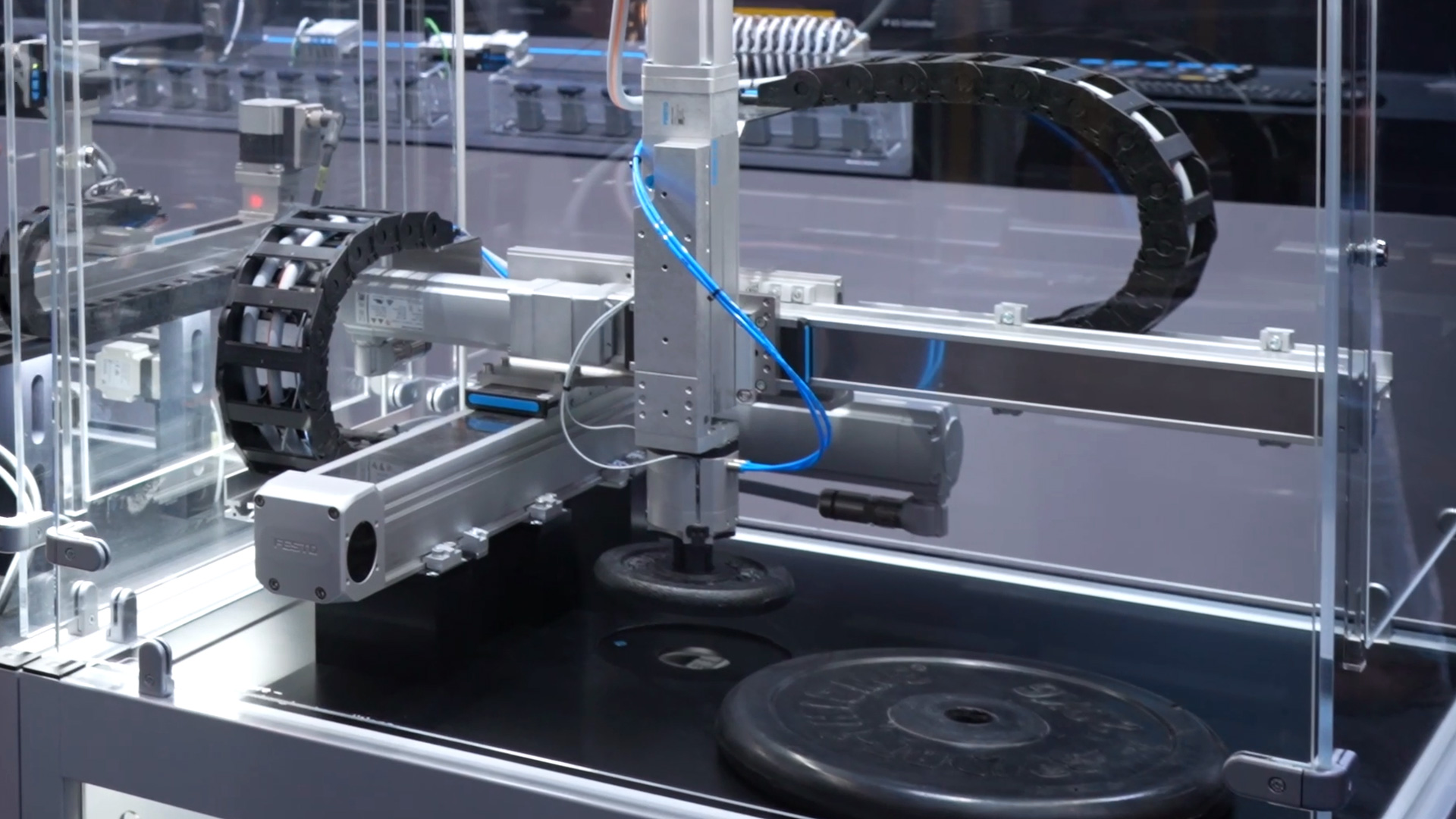
Boom handling is not limited to the mechanical structure. It also integrates drive technology, controls and cabling into a single unit. The result is a system that is ready for immediate use. It is delivered pre-assembled, fully wired and with the necessary commissioning data. In practice, this means a significant reduction in integration work. Instead of connecting and programming individual components, the system can be put into operation straight away. In addition, digital data such as CAD models and data sheets are available to support planning and integration. This approach reflects a development that is becoming apparent in many areas of industry. Systems are no longer seen as a loose combination of individual parts, but as integrated solutions that combine mechanical and digital components.

Further development of the modular system for future applications
The system shown is not designed as a complete solution. Rather, the modular system will be continuously expanded. New motors, axes and components will be integrated to cover additional requirements. At the same time, further functions are to be added that go beyond pure kinematics. A future focus will be on the greater integration of control and additional functional units. These include grippers, rotary drives and additional motion components. The aim is to develop an even more comprehensive solution from the existing system that can cover larger parts of an automation process. This development shows that the role of handling systems is changing. They are increasingly becoming central elements within complex production structures. Their task is no longer just to move components, but to integrate them into higher-level processes that combine efficiency, flexibility and scalability. Configurable cantilever handling is therefore an example of a change in industrial automation. Systems are no longer created from technical components alone, but from a combination of digital planning, modular design and application-orientated implementation.





Trade fair reporting Germany - Trade fair knowledge, dates & events